The behaviour of the current and power in a variable speed drive system is not always well understood by users, especially the question of how the drive input and output currents change as the motor shaft speed and load change. Throughout this article we look at the basics of variable speed drives; current, power and torque.
Motor current
The torque produced by an electric motor is the product of magnetic flux acting on current-carrying conductors. For a given motor flux level the torque is a direct function of the current which links the flux.
In a DC machine, the flux is set by the excitation (field) winding current, and the torque is the product of the flux and the armature current.
In an AC motor without a permanent magnet, the flux amplitude is set by the ratio of the applied voltage to the frequency. The torque is the product of the flux and the torque-producing current, i.e. the component of current which is in phase with the voltage.
In DC motors and AC induction motors, the magnetising current is usually constant regardless of torque, unless a special energy-saving control is applied at reduced torque. For a small induction motor the magnetising current can be a considerable proportion (e.g. 70%) of the rated current. It is a benefit of a permanent-magnet motor that no magnetising current is required, so the losses associated with this current are avoided.
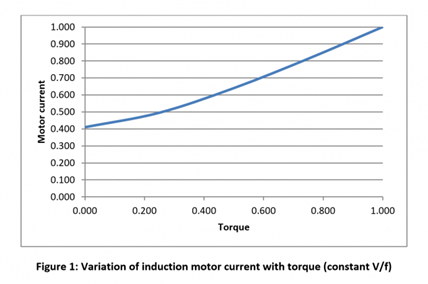
Figure 1 shows a typical variation of (normalised) motor current with torque, for an induction motor with a fixed supply voltage. The variation with speed is insignificant.
Motor power
The power at the shaft is given by the product of the torque and the speed.
If we ignore losses then the electrical power input is given, for a DC machine by the product of the DC voltage and current, and for an AC machine by the product of the r.m.s. voltage and the component of current in phase with the voltage, since the current usually lags the voltage in phase.
To a first approximation, the current depends on the torque and the voltage on the speed. The input power is similar to the output power except for the losses, which at rated power are usually in the range of 5% to 20% of rated power.
Drive currents and power
Since drives use switching devices with minimal power loss, around 2%, the input power has to be very close to the output power. The behaviour of the drive input current is a little less obvious.
Figure 2 shows the essential elements of a DC drive armature rectifier.
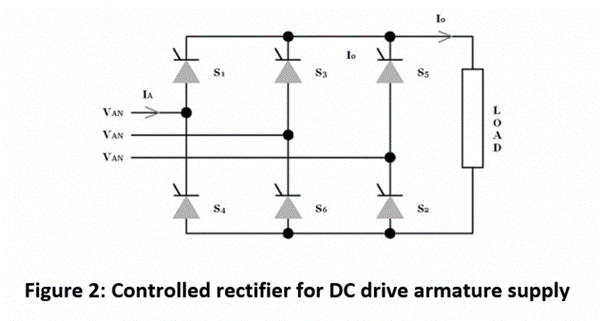
The thyristors allow the output voltage to be regulated in order to control the motor torque and speed. Note that there is continuity between the input phases and the output, with no alternative current paths such as capacitors or shared connections. Except during the brief overlap interval only two thyristors conduct at any time, so the load current always has to flow in the input phases unless a freewheel diode is fitted.
DC drive – output
The current in the output of a DC drive is the motor armature current, which is proportional to torque. There is an additional small converter to supply the field.
DC drive – input
If we now look at how the input current is affected by the motor operation, we see that the magnitude of the input current is directly proportional to torque in a very simple relationship. If current ripple can be ignored then eqa. This is regardless of the speed, or output voltage[1].
How then can the input power vary to match the output, if the input current and voltage are independent of speed? The answer is that the input power factor changes, since when the rectifier is phased back (firing angle greater than 0°) the input current lags the supply voltage in phase. In the extreme, if the motor is stationary but delivering rated torque, so the shaft power is zero, the input current is still at its rated value, but with a phase lag which would be 90° were it not for the losses. This can be quite a serious drawback of DC drives, and is the reason why large DC drives are often used with power factor correction capacitors.
AC drive – output
The AC drive output current is the motor current, which as we have seen comprises a torque-producing component and a magnetising component, the latter being supplied by the drive regardless of the required torque. The current in the inverter stage, which accounts for a large part of the material cost of the drive, is therefore a function of the output torque together with a fixed component. It is scarcely affected by the speed.
AC drive – input
Figure 3 shows the essential elements of an AC inverter drive.
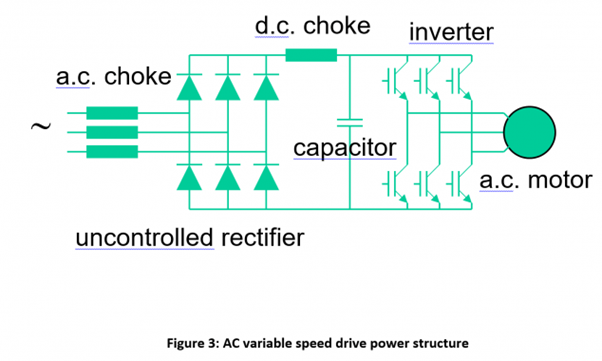
The three phase legs of the inverter are connected to the same DC bus circuit, which is supplied by the rectifier. The presence of this common connection means that when the inverter output voltage is less than its maximum value, i.e. at a speed less than base speed, the output current partially circulates between the inverter phase legs. The same applies to the reactive part of the output current. The DC bus only has to supply the actual power required by the motor, i.e. the product of the output voltage and the real (active) part of the current. The DC voltage is fixed by the supply voltage, so the DC current varies in proportion to the power, or to the speed if the torque is constant.
The rectifier input current reflects the DC bus current. The input power is practically the same as the DC bus power, since the rectifier loss is negligible. The r.m.s. value of current is rather higher than would be expected for the power, because the waveform is not sinusoidal, i.e. the current contains harmonics. As the current increases the harmonics become proportionately less because of the smoothing effect of the smoothing or harmonic-reduction chokes. At rated load power the r.m.s. input current is often quite close to the r.m.s. output current, and this can lead to users assuming that they are the same. However, this is really just a coincidence, with typical motors having power factor of about 0.85, and typical drives having distortion factor about 0.85. At reduced speed the two currents become completely different.
To summarise, Figure 4 shows how the input and output current of a typical AC drive vary as the speed and torque vary. All quantities are normalised so that the rated or base value is 1.0.
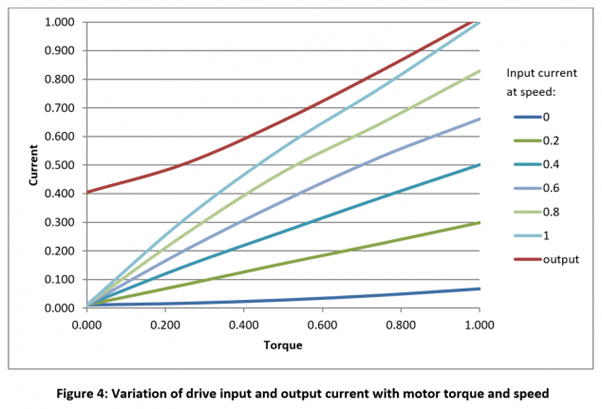
There is only a single line for the output current since it scarcely varies with speed. The input current increases as a function of the product of torque and speed, but with diminishing slope as the effect of the chokes becomes more pronounced as rated current is approached, improving the power factor by reducing the current harmonics. There is a small fixed loss and some loss varying with torque, as seen in the line for zero speed, mainly caused by resistive loss in the motor windings.
Direction of torque and speed – regeneration
For simplicity, the discussion above has applied to single-quadrant situations. If the torque and/or speed can reverse then some additional factors must be taken into account.
For DC drives, a four-quadrant application requires two thyristor bridges to allow for the bidirectional DC current. The input current behaviour as the direction of rotation reverses is a continuation of the single-quadrant case, the power factor passing through zero at zero speed and then rising back towards the maximum of about 0.82 but with the phase of the real part reversed giving reversed power flow.
For AC drives, the uncontrolled rectifier cannot return power to the mains supply. The inverter is naturally regenerative, so with an overhauling load the DC bus receives the returned power, and a resistive braking circuit is required to avoid an over-voltage trip. The input current is then zero.
We can summarise all of the above in a graph as shown in Figure 5. This applies to a (rather theoretical) constant torque load, i.e. one where the torque is constant over the whole speed range from -100% to +100%. In practice this occurs with a lift or hoist carrying a fixed load, and where the acceleration is low enough for us to ignore the force required to accelerate the load. In other words, we vary the speed slowly.
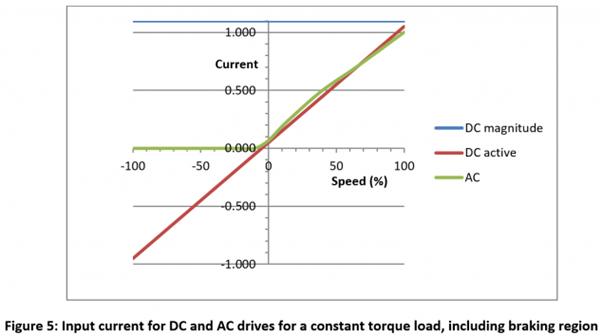
In Figure 5, we begin at maximum speed. For both DC and AC drives the input current is about 100%. We now begin to reduce the speed. For the DC drive the input current magnitude remains unchanged, and we can only tell that the speed is falling if we look at its active component (in phase with the voltage). For the AC drive the input current falls, not quite proportionately to the speed.
At a speed of zero the DC drive input current is still slightly over 100%. Its phase angle is nearly -90°, the only active part of the current being caused by the power losses, since the shaft power is zero. The AC drive input current is very low, delivering only the power losses. The power factor is rather poor because the smoothing chokes have little effect at such a low current – but this is of no practical importance since the current is much lower than the rated value.
At negative speeds the DC drive input current is still at its rated value, but the real part has become negative, so the drive is returning regenerated energy to the mains supply, with a rather low power factor. The AC drive has a current of zero, because the input rectifier has been blocked and the drive power loss is being supplied by the regenerated power from the load. Any spare power has to be dissipated in the braking resistor.
If you want to learn more about Variable Speed Drives, we can offer engineer training, either at your site or you can come to one of our service centres in the UK. Email us at [email protected] for more information.
